Linux 嵌入式系统-线程编程全面详解⚓︎
约 2099 个字 24 行代码 预计阅读时间 11 分钟
这份文档基于《Linux线程编程》课件,对其中的所有知识点进行了全面、详细的梳理和讲解。
代码见D:\Program Files\Project\C\Embedded_System\Code_By_PPT
第一部分:线程简介 (Thread Introduction)⚓︎
1. 为什么要使用多线程?⚓︎
在嵌入式Linux开发中,多线程(Multi-threading)是一种非常重要的并发编程模型。课件中特别强调了它相对于多进程(Multi-process)的“节俭”特性:
- 资源消耗少:
- 启动开销:启动一个线程所花费的空间和资源远远小于启动一个进程。进程需要独立的地址空间、文件描述符表等,而线程依附于进程存在。
- 地址空间共享:运行于同一个进程中的多个线程,它们彼此之间使用相同的地址空间,共享大部分数据(如全局变量、堆内存、文件描述符)。
- 切换效率高:
- 上下文切换:线程间彼此切换所需的时间远远小于进程间切换所需要的时间。因为线程切换不需要切换页表(内存映射),只需要切换寄存器状态和栈。
- 通信方便:
- 直接数据访问:因为共享地址空间,一个线程的数据可以直接被其他线程访问,无需像进程间通信(IPC)那样通过复杂的管道、消息队列或共享内存机制。
2. Linux 线程标准⚓︎
- POSIX 线程 (pthread):Linux 系统下的多线程遵循 POSIX (Portable Operating System Interface) 线程接口标准。
- 开发环境:
- 头文件:
#include <pthread.h> - 编译链接:需要链接
libpthread.a或动态库,编译时通常需加上-lpthread参数(例如:gcc main.c -lpthread)。
- 头文件:
第二部分:线程的基本管理 (Creation & Termination)⚓︎
这一部分涉及如何产生一个线程以及如何结束它。
1. 创建线程 (pthread_create)⚓︎
这是多线程编程的入口函数。
- 函数原型:
- 参数详解:
thread: 指向pthread_t类型变量的指针,用于存储新创建线程的标识符(ID)。attr: 用于设置线程属性(如优先级、栈大小)。如果为NULL,则使用默认属性。start_routine: 线程启动后执行的函数指针。该函数必须形如void *func_name(void *arg)。arg: 传递给运行函数的参数。如果需要传递多个参数,通常传入一个结构体的指针。
-
返回值:
- 成功:返回
0。 - 失败:返回错误码(不为0)。
EAGAIN: 系统限制创建新线程(如线程数过多)。EINVAL: 属性值非法。
- 成功:返回
-
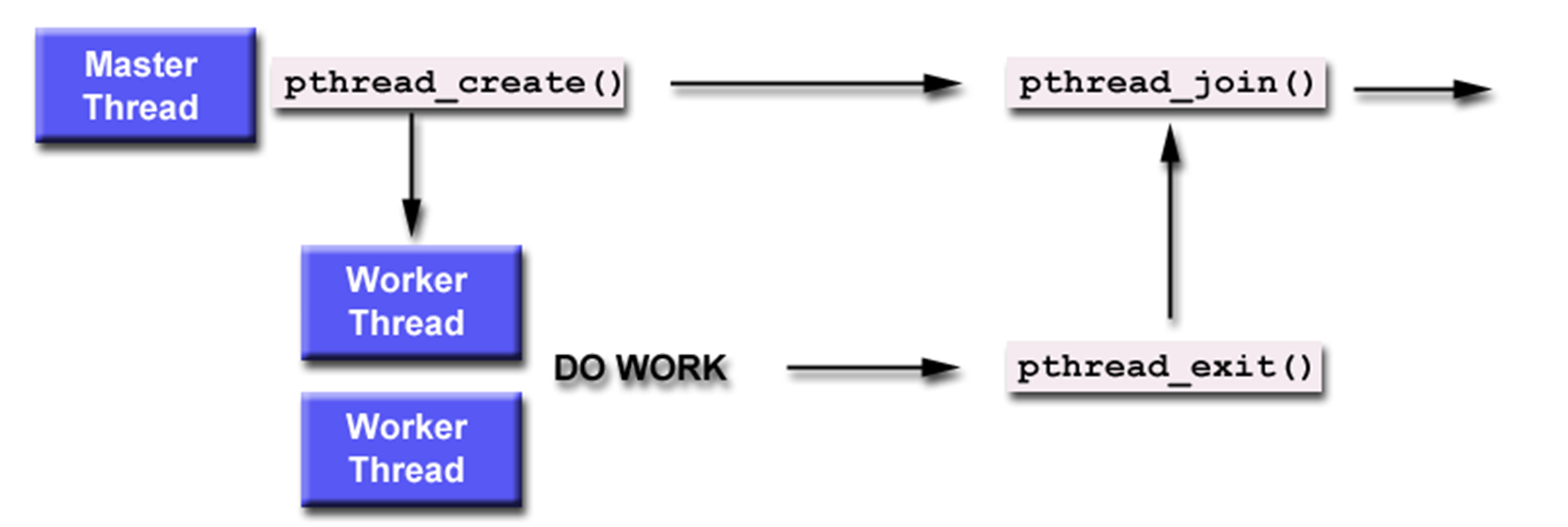
执行流程:创建成功后,新线程开始运行
start_routine,而原线程(主线程)继续执行下一行代码。
2. 结束线程⚓︎
线程可以通过以下三种方式结束:
- 自然结束:线程函数执行完毕,自然返回。
- 自我结束 (
pthread_exit):- 原型:
void pthread_exit(void *value_ptr); - 参数:
value_ptr是线程的返回值(退出码),可以被其他线程通过pthread_join获取。
- 原型:
- 被动结束 (
pthread_cancel):- 原型:
int pthread_cancel(pthread_t thread); - 功能:请求结束另一个线程。
- 注意:如果线程所在的进程结束了(例如主函数
main返回或调用exit),那么该进程内的所有线程都会被强行终止。
- 原型:
案例参考:请查看生成的代码文件
01_thread_basic.c
第三部分:线程属性与同步等待 (Attributes & Join)⚓︎
1. 线程属性 (pthread_attr_t)⚓︎
线程创建时可以通过属性对象来精细控制线程的行为。
- 初始化与销毁:
pthread_attr_init(pthread_attr_t *attr): 初始化属性对象为默认值(必须在pthread_create前调用)。pthread_attr_destroy(pthread_attr_t *attr): 销毁属性对象,释放资源。
- 分离状态 (Detach State):这是课件中重点提到的属性。
- 绑定/非分离 (Joinable/Non-detached): 默认状态。线程结束时,其资源不会立即释放,必须由其他线程调用
pthread_join来回收并获取返回值。 - 分离 (Detached): 线程结束时,系统自动回收资源。不能被 join。
- 绑定/非分离 (Joinable/Non-detached): 默认状态。线程结束时,其资源不会立即释放,必须由其他线程调用
- 相关函数:
pthread_attr_setdetachstate(attr, detachstate): 设置分离状态。pthread_attr_getdetachstate(attr, detachstate): 获取分离状态。detachstate可选值:PTHREAD_CREATE_JOINABLE(默认),PTHREAD_CREATE_DETACHED。
2. 线程等待 (pthread_join)⚓︎
用于同步,等待一个线程结束。
- 函数原型:
-
功能:调用此函数的线程会被阻塞,直到标识符为
thread的线程结束。 -
参数:
thread: 等待的目标线程 ID。value_ptr: 指向指针的指针,用于存储目标线程pthread_exit时返回的数据。
3. 动态分离 (pthread_detach)⚓︎
如果在创建后想将线程设为分离状态(不关心其返回值,希望它结束后自动释放资源),可以使用:
int pthread_detach(pthread_t thread);
案例参考:请查看生成的代码文件
02_thread_join_detach.c
第四部分:线程互斥锁 (Mutex)⚓︎
当多个线程需要访问同一个公共资源(如全局变量)时,需要使用互斥锁来防止竞争条件(Race Condition)。
- 概念:互斥锁只有两种状态:锁定 (Lock) 和 非锁定 (Unlock)。
- 数据类型:
pthread_mutex_t - 核心函数:
- 初始化:
pthread_mutex_init(&mutex, NULL): 动态初始化,NULL表示默认属性。- 或者静态初始化:
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
- 上锁:
pthread_mutex_lock(&mutex): 尝试上锁。如果锁已被其他线程占用,当前线程阻塞(睡眠),直到锁被释放。pthread_mutex_trylock(&mutex): 非阻塞版本。如果锁被占用,立即返回EBUSY,不会等待。可用于防止死锁。
- 解锁:
pthread_mutex_unlock(&mutex): 释放锁,唤醒正在等待该锁的线程。
- 初始化:
案例参考:请查看生成的代码文件
03_mutex_lock.c
第五部分:条件变量 (Condition Variables)⚓︎
互斥锁用于“排他性”访问,而条件变量用于“等待某个事件发生”。它弥补了互斥锁的不足,允许线程在条件不满足时挂起,条件满足时被唤醒。通常与互斥锁配合使用。
-
工作机制:
- 线程 A 获得互斥锁,检查条件。
- 如果条件不满足,线程 A 调用
pthread_cond_wait。这会原子地释放互斥锁并进入睡眠状态。 - 线程 B 获得互斥锁,改变条件(例如生产了数据)。
- 线程 B 调用
pthread_cond_signal通知等待的线程。 - 线程 A 被唤醒,重新获得互斥锁,继续执行。
-
核心函数:
-
初始化:
pthread_cond_init(&cond, attr): 动态初始化。
-
等待:
pthread_cond_wait(&cond, &mutex): 阻塞等待信号。注意必须传入互斥锁,因为需要在等待前解锁,唤醒后加锁。pthread_cond_timedwait(&cond, &mutex, &abstime): 限时等待,超时后自动解除阻塞。
-
唤醒:
pthread_cond_signal(&cond): 唤醒一个等待该条件的线程。pthread_cond_broadcast(&cond): 唤醒所有等待该条件的线程。
-
案例参考:请查看生成的代码文件
04_cond_var.c
第六部分:信号量 (Semaphores)⚓︎
信号量本质上是一个非负的整数计数器,用来控制对公共资源的访问数量。它常用于“生产者-消费者”模型。
- 头文件:
#include <semaphore.h>(注意不是 pthread.h,虽然常一起使用) - 核心操作:
- P操作 (Wait/Decrease): 想要使用资源,信号量减1。如果信号量为0,则阻塞等待。
- V操作 (Post/Increase): 释放资源,信号量加1。如果有线程在等待,唤醒它。
- 核心函数:
sem_init(sem_t *sem, int pshared, unsigned int value): 初始化。value是初始值。sem_wait(sem_t *sem): 阻塞等待,直到信号量 > 0,然后减1。sem_trywait(sem_t *sem): 非阻塞等待。sem_post(sem_t *sem): 增加信号量(V操作)。sem_destroy(sem_t *sem): 销毁信号量。
案例参考:请查看生成的代码文件
05_sem_producer_consumer.c
总结⚓︎
嵌入式Linux操作系统中的线程编程核心在于资源共享与同步互斥。
- 基础:利用
pthread_create和pthread_exit管理线程生命周期。 - 属性:利用
pthread_attr控制线程是 Joinable 还是 Detached。 - 安全:利用 互斥锁 (Mutex) 保护临界区,防止数据竞争。
- 协作:利用 条件变量 (Cond) 实现线程间的事件通知。
- 流控:利用 信号量 (Semaphore) 控制并发资源的数量(如缓冲区大小)。
EXAM⚓︎
关键注意点:是否取地址、其他参数及其位置、关键参数,一般太会考参数类型